Navigation and Robotic-Assisted Spine Surgery
Daniel J. Hedequist
Indications
Any age
Instability
Trauma
Tumor
Deformity
Equipment
Robotics
Workstation
Robotic arm
Navigation system to include instruments
Navigation
Workstation
Navigation system to include instruments and display panel
Three-Dimensional Imaging System
Institutional preference O-arm (Medtronic)
Compatible with robotic/navigation system
Imaging
Preoperative computed tomography (CT) scan with dosing protocol for pediatric patients as well as dosing compatibility with computer software
Alternative is to obtain intraoperative three-dimensional scanning (O-arm or equivalent/compatible)
Positioning
Prone positioning for standard spine deformity surgery. Need to assure for three-dimensional imaging such as O-arm that the appropriate area of the spine can be scanned. For example, for imaging the proximal spine, the O-arm may not be able to circumferentially fit around the table with the arm boards in standard position
Cervical spine: Arms down at side and taped down in secure position
Standard spine: Arms taped down or placed in “superman” position (Figure 4.1)
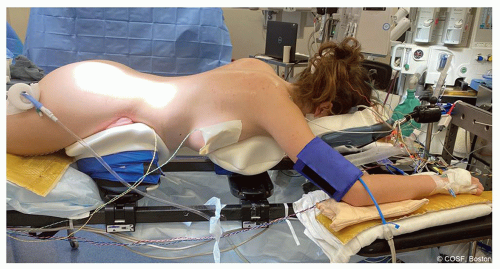
Figure 4-1 ▪ Clinical photo of patient in the operating room in a “superman” position. This allows for O-arm imaging. (Courtesy of Children’s Orthopaedic Surgery Foundation.)
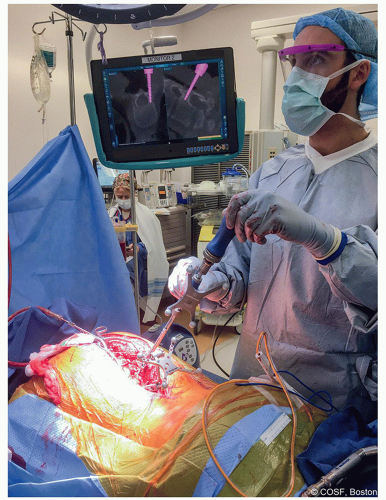
Figure 4-2 ▪ Operating room photo showing correct ergonomic technique for navigation. (Courtesy of Children’s Orthopaedic Surgery Foundation.)
Navigation cameras and screens should be set up to optimize surgical efficiency and visualization
Cameras should be placed in order to have a direct line of sight with the reference frames and instrument arrays placed in surgical fields
Navigation screens should be placed in optimal positions for efficient and ergonomic techniques (Figures 4.2 and 4.3)
Exposure
Standard posterior subperiosteal exposure of spine over area of interest
Different workflows exist with regard to when facetectomies or osteotomies are done, as these may cause excess spine motion, which affects accuracy of registration. In general, 2 options exist:
Once the region is scanned and registered, then navigated burring of the starting point and drilling of the appropriate screw path is done, followed by placing FloSeal and moving to the next level. Screws are then placed after the surgeon does facetectomies/osteotomies
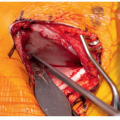
Performing facetectomies prior to scanning and then moving forward with registration and then placement of screws with navigation. This allows for more direct visualization of anatomy and starting points as would be done with free-hand screw placement (Figure 4.4)
Navigation Surgical Technique
Navigation requires a workstation, navigation instruments, three-dimensional imaging, optical cameras, an array(s) in the surgical field, and monitors which relay the three-dimensional images of the spine and active navigation. Navigation can be considered free-hand screw placement with image guidance
After exposure of the spine, the reference frame with spherical arrays needs to be placed into the field with connection to the spinous processes. Depending on the length of the field, there may be 2 reference frames, which in general are placed proximally and distally (Figures 4.5 and 4.6)

Figure 4-3 ▪ Contralateral operating room view demonstrating screen setup. (Courtesy of Children’s Orthopaedic Surgery Foundation.)
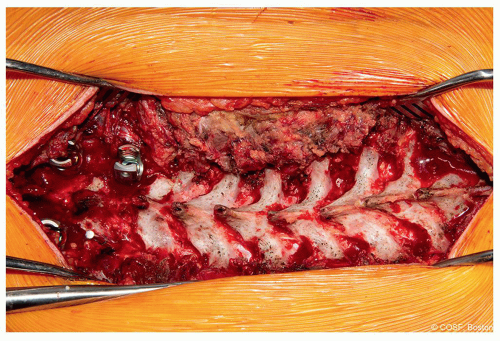
Figure 4-4 ▪ Exposure of the spine with facetectomies prior to registration. (Courtesy of Children’s Orthopaedic Surgery Foundation.)
Registration of the instruments may be done by the surgical team and is not time-consuming
Once the reference frame (s) is attached, then a three-dimensional scan is taken, which at our institution is done by an O-arm (Figure 4.7). This may be 1 or 2 spins of the machine depending on the length of the surgical field to be navigated
After imaging and registration, the placement of screws can begin with the first step making sure the optical camera has a clear pathway of vision with the reference frame arrays (Figure 4.8)
The navigated instruments are then used to place the screws after burring the starting point, using a handheld awl, tapping, and placing the screw (Figure 4.9). All of the instruments have arrays connected to them, and the starting point, instrument trajectory, and instrument depth can be seen on the navigation screens in the axial, coronal, and sagittal planes (Figures 4.10,4.11,4.12,4.13,4.14,4.15,4.16)Related posts:
 Occiput and Posterior Cervical Instrumentation
Occiput and Posterior Cervical Instrumentation
 Decision-Making in Pediatric and Adolescent Hip Disorders
Decision-Making in Pediatric and Adolescent Hip Disorders
 Clubfoot Casting and Heel Cord Lengthening
Clubfoot Casting and Heel Cord Lengthening
 Radioulnar Synostosis Derotation Osteotomy
Radioulnar Synostosis Derotation Osteotomy
 Neuromuscular Hip Surgery: Prevention to Reconstruction
Neuromuscular Hip Surgery: Prevention to Reconstruction
 Minimally Invasive Techniques for Foot Deformity Correction
Minimally Invasive Techniques for Foot Deformity Correction

Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


