Fig. 69.1
Schematic diagram of the first Robot-Assisted MicroSurgery (RAMS) device developed in 1990s. Connection between the surgeon ‘Master’ and the manipulator arm – the ‘Slave’ robot was realized via highly specialized main frame computer
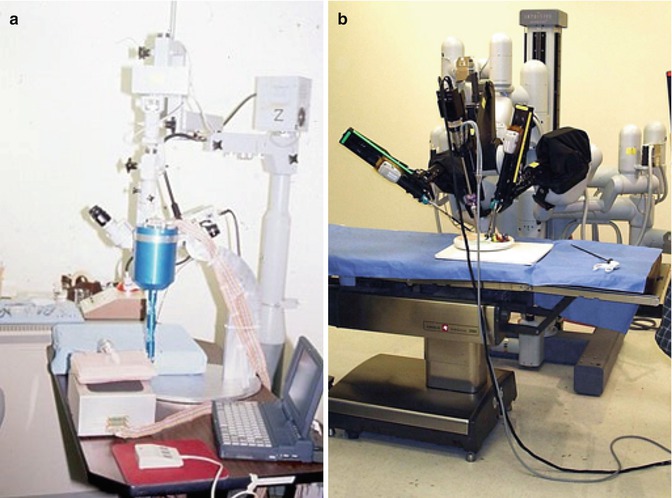
Fig. 69.2
The robotic computerized assistants. Panel (a) The first RAMS device build by NASA Jet Propulsion Laboratory (JPL). The presented on the picture system of a one arm micro-robot was tested in our Microsurgery Laboratories in 1990s. Panel (b) Contemporary sophisticated surgical robot system equipped in three arms and navigation system
Current progress in robotic technology is impressive: Instead of the simple joystick station – the operator have access to the entire sophisticated surgeon-controlled command center. Slave robot is not a single arm manipulator anymore. Now there are two, three or more arm devices equipped in the variety of the end effectors (Fig. 69.3).
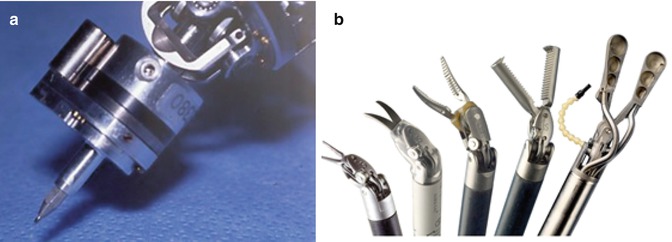
Fig. 69.3
The End effectors of the robotic arm. Panel (a) Single instrument attached to the articulated wrist of a single arm of the RAMS in 1990s. Panel (b) Multiple end effectors – surgical instruments currently available for the microsurgical robot systems
Multiple arm setting is able to work successfully thanks to the thousands time faster computers which are crunching millions of digital calculations per second. It is now a real time operating system. And now, ironically, the surgeon-operator became the slowest part of the system. However, despite the some speed deficiencies, the human operator will be still for many years the only Brain and the Master of the operations.
In addition to the progress in computer technology, the accurate 3D vision is available and facilitates the smallest possible operating field – which is needed for successful performance of the microsurgical tasks. The ability of manipulators to remarkably reduce hand tremor improves procedure outcomes and lowers the human error rates [7]. However, at the same time introduction of remarkable tremor suppressing features into the robot supported surgical procedures is on the cost of the prolonged operating time [8].
The milestone of utilizing robotic science in medicine in general and particularly in the surgical fields was when FDA approval of the robots was granted for the use during surgical procedures. In addition, the robots can diminish an influence of anxiety, fatigue, and/or age-related factors [9] which are unavoidable in case of human surgeons.
Microsurgeon’s manual efficiency is improved via magnification of the surgical area and scaling of the precise movements with simultaneous filtering of the vibration of the hands. Surgical procedures of free flaps are the next important example of taking the advantage of the mentioned above robots features in addition to the range of motion of the wrist and fingers of human operator.
Related posts:
 Microcirculation Model for Invasive Animal Monitoring
Microcirculation Model for Invasive Animal Monitoring
 Composite Osseomusculocutaneous Thymus Allotransplantation Model
Composite Osseomusculocutaneous Thymus Allotransplantation Model
 In Vivo Chimera Model: Creation of Primary and Secondary Chimera
In Vivo Chimera Model: Creation of Primary and Secondary Chimera
 Peripheral Nerve Surgery Models Crush Injury and Epineural Patch
Peripheral Nerve Surgery Models Crush Injury and Epineural Patch
 Heterotopic Vascularized Ovarian Autotransplantation Model in the Sheep
Heterotopic Vascularized Ovarian Autotransplantation Model in the Sheep
 Defect Repairs After Resections of Laryngeal Cancer, Hypopharyngeal Cancer, and Cervical Esophageal Cancer
Defect Repairs After Resections of Laryngeal Cancer, Hypopharyngeal Cancer, and Cervical Esophageal Cancer
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


