Robotic follicular unit extraction has been an important development within the realm of hair transplantation. Robotic hair transplantation has been shown to reliably and efficiently harvest follicular units with transection rates similar to manual techniques. The robotic device allows the potential for more physicians to incorporate hair restoration into their practice without a significant increase in personnel. The robotic software continues to evolve with advancements in technology and artificial intelligence that will continue to improve esthetic outcomes. This article will review current robotic techniques demonstrating its benefits and potential pitfalls.
Key points
- •
Robotic hair restoration is a safe, reliable, and efficient procedure that provides similar outcomes to manual techniques.
- •
Male patients with dark, thick hair, and thick skin are ideal candidates for robotic techniques.
- •
As with any hair transplant technique, proper hairline planning, patient comfort during the procedure, and postoperative care is essential to patient success and recovery.
- •
Continuing medical therapy for remaining hair is important to achieving long-term results in hair restoration.
Introduction: nature of the problem
Androgenic alopecia is the most common type of progressive hair loss. Classically in men, this is the progressive loss of terminal hair in the vertex and frontotemporal regions. Up to 80% of men are affected by age 70 years, whereas closer to 22% of women may be affected, primarily after menopause. Women also have a different pattern of loss, typically along the crown, sparing the hairline [ ].
Hair transplant surgery has evolved significantly since its introduction. The number of hair follicles originally used for harvest and placement was between 10 and 20; however, there were esthetic concerns of having a prototypical “hair plug” look. In the 1990s, graft size and the number of follicles used in transplants continued to decrease. Although early hair transplantation was performed using the technique of follicular unit transplant (FUT) in which a thin strip of hair-bearing tissue was harvested from the posterior scalp, the newer technique of follicular unit extraction (FUE) has enabled more minimally-invasive surgery for hair transplantation. FUE now focuses on each follicular unit being harvested individually rather than harvesting an entire strip of skin. Each follicular unit contains 1 to 4 hair follicles that are designed for a particular placement on the scalp based on number of hairs in the follicular unit [ ].
Harvest techniques have improved as well ranging from smaller manual punches to modern robotic technology. Manual techniques can be limited by operator fatigue when harvesting potentially several thousand follicular units. The manual technique requires the operator to remain diligent and precise over many hours harvesting grafts. In 2011, the first robotic system for hair transplantation was approved by the Food and Drug Administration [ ]. The robotic system was found to independently choose follicular units and harvest them with similar follicular unit transection rates compared with manual techniques [ ].
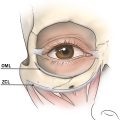
The Venus ARTAS® Robot (Venus Concept, San Jose, USA) allows for harvest rates of up to 1500 grafts per hour [ ]. The robotic system is approved for male patients with brown or black hair [ ]. The system consists of imaging, video cameras, video display, the robotic arm ( Fig. 1 ).

Surgical technique
Preprocedure Planning
Candidate selection is critical to success in robotic hair transplantation and includes the following key points [ ].
- •
Patients must have enough donor density in the posterior and lateral scalp. The number of follicular units available for grafting typically ranges from 5000 to 7500, with about 2500 to 3000 follicular units being able to be harvested and grafted in 1 day.
- •
Pigmented hair is necessary for detection by the robot, however white or gray hair may be dyed before the procedure for improved recognition.
- •
Photographs and videos are taken of the patient’s scalp and loaded into the robotic system software for use in harvesting and creating recipient sites.
- •
Patients with thick hair and thick, less mobile skin are the ideal candidates for the robotic device. These all allow for improved detection by the robotic arm.
Preparation and Patient Positioning
Robotic hair restoration will last several hours under local anesthesia; therefore, proper patient preparation is key to success and patient comfort [ ]. Below are key points to discuss with patients and steps to prepare for the procedure.
- •
Patients should dress comfortably, eat and drink normally, and bring music, video devices, books, or other entertainment.
- •
The procedural team ensures the patients are comfortable, able to take bathroom breaks, eat lunch, and are actively involved with patient care throughout the duration of the procedure.
- •
Oral or intravenous anxiolytic medications may be considered based on patient and surgeon preferences.
- •
The area to be transplanted is marked and both the patient and physician agree on the proposed treatment plan before beginning.
- •
The donor site is prepared first with the patient in the prone position on the robotic chair.
- •
Donor hairs along the posterior scalp and sides of the head need to be trimmed to 1 to 1.5 mm. This step can be a limiting factor for men or women with longer hair trying to avoid obvious procedural stigmata.
- •
Long hair will prevent the robot from working at its maximum efficiency and may cause an increase in transection rates.
- •
The posterior scalp donor site is then anesthetized with a combination of lidocaine and bupivacaine with epinephrine. It is important to monitor the amount of local anesthesia used throughout the case because it will be necessary to reinject throughout the procedure.
Procedural Approach: Follicular Unit Harvest
- •
After the patient is anesthetized, the robot arm is moved into position [ ].
- •
The patient is now positioned in the chair with their head leaning forward to their chest to allow access of the robotic arm to their posterior scalp (see Fig. 1 ).
- •
A 3 × 3 cm grid is placed on the posterior scalp that has markings to guide the robot for harvesting follicles. The robotic algorithm uses artificial intelligence throughout the harvesting process to ensure proper selection of grafts.
- •
This grid also acts as a skin tensioner to stabilize the skin for the robot ( Fig. 2 ).

Fig. 2
Skin tensioner and robotic grid in place. Follicular units being removed after robotic harvesting. The “yellow grid” is called the “ARTAS® XTensioner” and it helps to enhance graft quality by increasing tension on the scalp.
( From Avram MR, Watkins S. Robotic Hair Transplantation. Facial Plast Surg Clin N Am. 2020;28:194.)
- •
The robot calibrates to the grid and selects 90 to 110 follicular units within the grid.
- •
The robotic algorithm allows for 1-hair, 2-hairs, 3-hairs, or 4-hairs grafts to be selected based on the anticipated needs of the patient.
- •
The robot uses 2 types of punches. The first punch is sharp to cut through the dermis, while the second punch is dull and reaches into the superficial subcutaneous tissue to loosen an individual follicular unit.
- •
Once this is complete, manual extraction is then performed by the operator (see Fig. 2 ).
- •
The robotic algorithm is designed to not overharvest and deplete a particular region on the scalp with an average of every third follicular unit being extracted.
- •
The robot will not harvest grafts closer than 1.6 mm between follicular units. This is designed to camouflage the donor site and prevent visible scarring or hair thinning in the harvest region.
- •
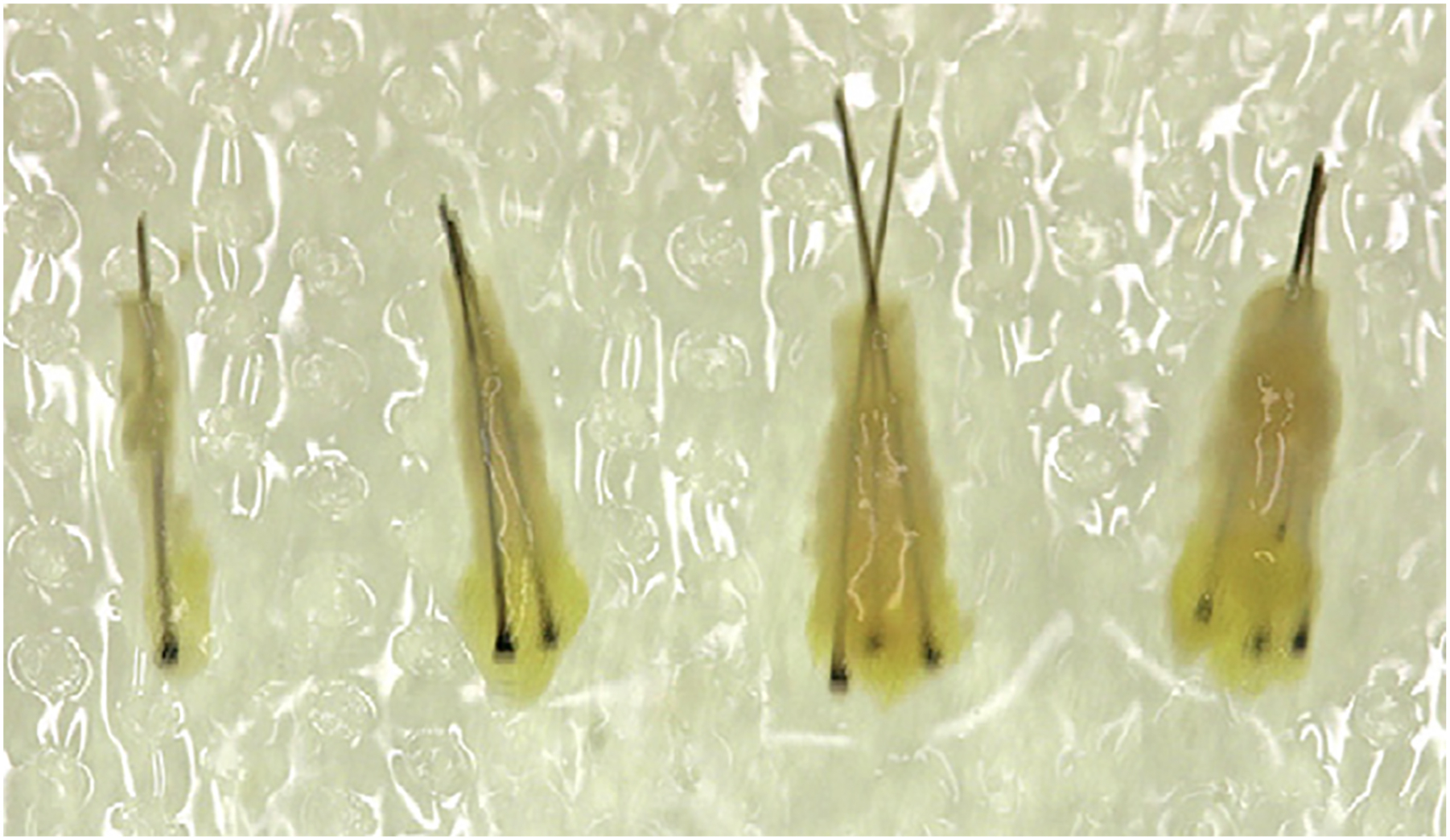
After the grafts are harvested, an assistant places the follicular unit into a chilled holding solution. The grafts are separated into 1-hair, 2-hairs, 3-hairs, or 4-hairs groupings ( Fig. 3 ).