64 Motorized Blunt Punch Follicular Unit Extraction
Summary
Keywords: blunt punch flat punch sharp punch follicle transection transection rates tumescence traction countertraction surgeon position S.A.F.E. system
Key Points
•Minimizing transections is key to success of any hair transplant surgery.
•To dissect the intact follicular unit, we need a punch edge that is able to penetrate the skin efficiently, but at the same time does not cut into the follicles as one penetrates deeper. In this aspect, the blunt and flat punches are more forgiving. The mechanism is to separate the tissue (blunt dissection) and not to cut the tissue.
•A blunt punch, compared to a sharp one, provides the surgeon with more feeling and tactile feedback of changes in resistance at various tissue levels during the follicular unit dissection, that is, penetrating the epidermis, separating the arrector pili muscle and below it, advancing in the wrong direction, etc.
64.1 Introduction and History
Follicular unit extraction (FUE) is a relatively new technique when compared to the traditional strip harvest surgery. In 1988, Masumi Inaba in Japan described the use of a 1-mm needle for removing follicular units (FUs).1 In 1989, D. Ray Woods in Australia started using the FUE in routine hair transplant procedures. Originally only sharp punches were used for FUE. Sharp punch FUE was not well accepted at first due to the potential for high transection rates, slow speed, and long learning curves needed to master the intricacies of the technique. The difficulties associated with performing FUE were first described by Rassman et al in their 2002 article.2 They pointed out that FUs are firmly attached to the surrounding dermis around the level of the arrector pili muscle. With FUE, a punch has to be advanced to a depth where these attachments are broken. This is technically difficult because it is a blind dissection and the exact depth of the attachments can vary. In addition, the path of the follicles under the skin are not predictable from the surface, and changes with different degrees of curl or splay.3 To perform FUE successfully with a sharp punch, one needs to master the ability to “blindly” follow the path of the follicle to the point where attachments are broken, but not advance deeper than where the risk of transection increases.
In 2002, Jim Harris introduced the first dull punch in an attempt to decrease transection. It was a manual two-step punch consisting of a sharp punch on one side to score the epidermis and a blunt punch on the other side for deep dissection. Transection decreased, but the process was slow. He later developed a motorized version of a blunt punch called the Surgically Advanced Follicular Extraction (S.A.F.E.) system, which increased speed significantly (Fig. 64.1). Physicians who struggled with the sharp technique reported this system was easier to learn and more forgiving with respect to transection (Video 64.1).
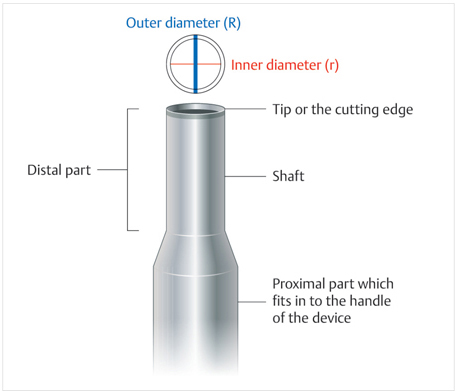
Fig. 64.1 The original Harris two-step manual blunt punch parts and dimension of the punch.
The disadvantages of the blunt punches were buried grafts, the need for high rotational speeds to penetrate the skin, and difficulty using them with lax tissue (like beard and body). The blunt punch systems have continued to evolve with modifications of both punch design and more sophisticated motors. More recent designs of blunt punches are flat rather than rounded. They also have thinner walls and an outside corner, both of which help make skin penetration easier. These modifications have helped solve some of the disadvantages mentioned earlier. In this chapter, we focus on the basic principles and technique of the blunt punch technique. We briefly mention some modifications we have made to the blunt punch. Other flat blunt punch designs such as the Harris Hex Punch and Devroye flat Tornado (formerly trumpet) punch are discussed in more detail elsewhere (see Chapter 67).
64.2 Principles of Working with a Blunt versus a Sharp Punch
Motorized punches are hollow cylinders divided into a proximal and a distal part. The proximal part fits into the handpiece of a motorized device. The distal part is composed of the shaft and the distal tip (or cutting edge). The shaft has an outer diameter (R) and inner diameter (r). The cutting edge with a sharp punch will be located on the outer diameter, middle, or inner diameter depending on the bevel of the punch. The distance between the cutting edges determines the size of the wound created with the punch (Fig. 64.1; see Chapter 54).
As explained in Chapter 63, Motorized Sharp Punch FUE, increased axial force while punching through the epidermis will cause follicles to distort (bend forward) and increase the possibility of transection during advancement of a sharp punch. This is why with the sharp punch technique it is important to have as sharp a tip as possible, in order to minimize the axial force needed to penetrate the skin.
Blunt punches have a different design and mechanism of action. There is no an anterior directed sharp cutting edge to dissect the epidermis with a blunt punch. The S.A.F.E. system blunt punch developed by Harris had a distal tip that beveled slightly inward and was rounded at the tip to make it blunt. The inner diameter of the punch varied from 0.8 to 1.2 mm and the outer diameter ranged from 1.0 to 1.4 mm. This made the width of the punch wall approximately 0.2 mm. The length of the punch was 4 mm (Fig. 64.2).
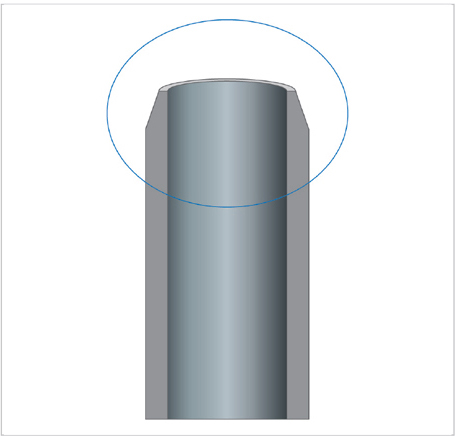
Fig. 64.2 Basic design of blunt punch.
An important distinction between blunt and sharp punches is that the surface area in contact with the skin is greater with a blunt punch than with a sharp punch. This is shown in the following formula:
Surface area of the punch in contact with the skin:
(A) = π(R–r)2
where A is the surface area of the tip of the punch in contact with the skin. For blunt punches, it is the difference between the outer (R) and the inner (r) diameters of the punch, less beveling. With sharp punches, there is very little surface area in contact with the skin because the inner and outer diameters merge at the cutting edge.
What does this mean with respect to the total force needed to penetrate the epidermis with a blunt punch versus a sharp punch? This is shown in the following formula:
Total force needed to penetrate the skin:
F = A × P
where F is the total force needed to penetrate the epidermis, A is the surface area of the punch in contact with the skin, and P is the pressure needed to penetrate the skin per unit area.
It is obvious that since the surface area in contact with the punch is greater for blunt than for sharp punches, the total force needed to penetrate the epidermis is greater for blunt than for sharp punches.4
There are two types of forces that can be applied to increase force with motorized punches (Fig. 64.3):
•Type 1: Axial force applied in the long axis of the hair follicle.
•Type 2: Rotational force (or torque) applied horizontally on the skin surface due to punch rotation.
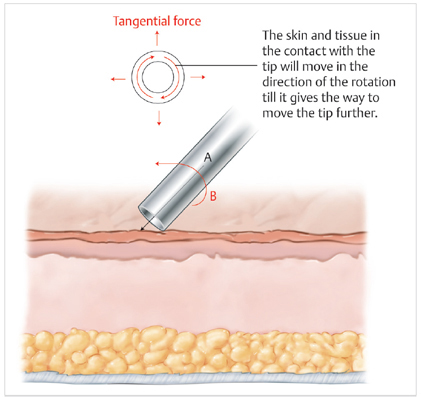
Fig. 64.3 Diagram showing forces applied on the skin. A. Axial force, exerted due to the forward movement of the punch in the direction of follicular unit (FU). B. Rotational force exerted due to the circular movement of punch, which causes the movement of the skin in the contact with the tip in the direction of the rotation as shown in upper diagram, whereas the skin outside the punch is fixed.
If too much axial force is used, it can lead to undesirable distortion and misalignment of the targeted follicle unit. With blunt punches, it is better to increase rotational force (torque) than axial force. This is done by increasing the rotational speed. This rotational force leads to movement of the skin in contact with the punch in the direction of the rotation, while the skin not in contact with the punch stays fixed, resulting in separation of the epidermis and dermis from its weakest connection.
More simply stated, a rotating sharp punch actually cuts the epidermis, upper dermis, and arrector pili muscle to separate the FU. A blunt punch separates these structures by pushing them apart with the shearing force (or blunt dissection) generated by higher rotation speed of the punch. Once through the epidermis, since dermal tissue is much less dense, the force needed to continue to advance the punch becomes less. Many blunt systems take advantage of this property and have a mechanism to slow rotation once through the epidermis.
When a sharp punch is advanced beyond the arrector pili muscle, the chance of it “cutting” and transecting a follicle increases, especially if there is curl or follicular splaying. But with a blunt punch, the blunt edge of the punch acts more as a “guide” and directs follicles either inside or outside the lumen depending on their location. So, in addition to low transection rate, this method also allows the deeper dissection and near complete separation of FUs, thus minimizing the force and manipulation required to extract the dissected FU (Fig. 64.4).5,6
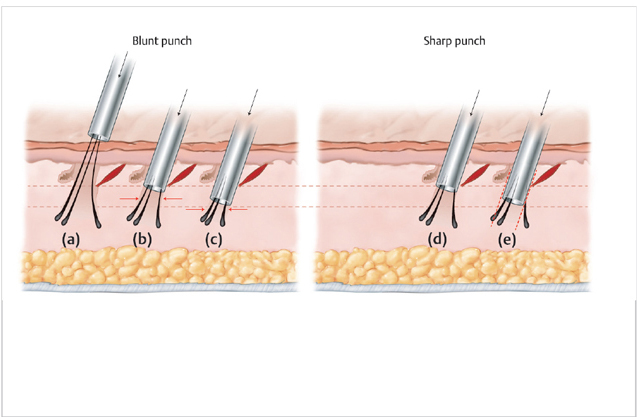
Fig. 64.4 Diagram showing cutting of the follicle by sharp punch and pushing of the follicle into the lumen or outside by blunt punch. (a)Blunt punch: engagement with the skin. (b) Blunt punch: advancement up to the attachment of the arrector pili (AP) muscle to separate the attachments. (c) Blunt punch: below the level of the attachment of AP muscle, the follicular splaying starts. While advancing the punch beyond this level, a blunt edge will “guide” the follicle coming across the path toward the lumen of the punch and not causing the transection. (d) Sharp punch: key to using a sharp punch is that the punch insertion is subjected to depth limitation (precisely up to the attachment of the AP muscle). (e) Sharp punch: transection rates increase dramatically if one goes beyond the region where follicle splay begins because the sharp edge will cut the follicle coming across its path.
Related posts:
 Hair Anatomy and Histology for the Hair Transplant Surgeon
Hair Anatomy and Histology for the Hair Transplant Surgeon
 Plugged in: How to Ensure That Your Practice Thrives (and Survives) in Today’s DigitalWorld
Plugged in: How to Ensure That Your Practice Thrives (and Survives) in Today’s DigitalWorld
 Transplanting into Areas of Cicatricial Alopecia
Transplanting into Areas of Cicatricial Alopecia
 Special Considerations for Postoperative Care in Follicular Unit Excision
Special Considerations for Postoperative Care in Follicular Unit Excision
 Hairline and Recipient Area Repair of Poor Previous Transplantation
Hairline and Recipient Area Repair of Poor Previous Transplantation
 Ergonomics in Hair Restoration Surgery: FUE Technique
Ergonomics in Hair Restoration Surgery: FUE Technique
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


