66 Automated/Robotic Follicular Unit Excision
Summary
Keywords: FUE FUE automation robotic FUE blunt punch FUE
Key Points
•The ARTAS robotic follicular unit excision (FUE) system is the only truly automated device for performing FUE.
•The users of this device can input parameters to control the dissection process to manage the surgery requirements and adjust for patient donor area characteristics.
•The evolution of the technology is continuous with plans for the robot to make recipient sites and implant grafts.
66.1 Introduction
Follicular unit excision (FUE), although embraced by the general patient population, has been slow to be incorporated into the practices of many physicians due to the amount of physician time required and the slow learning curve to become proficient in the manual technique.
Dr. Philip Gildenberg, a Houston neurosurgeon familiar with robotic technology, formed a company, Restoration Robotics, Inc., in 2002 to develop a robotic FUE device meant to take a physician with no FUE experience to a provider of this procedure in a short amount of time. Human testing began in 2006 under institutional review board (IRB) oversight and Food and Drug Administration (FDA) clearance was obtained in April 2011.
The initial design utilized a sharp punch dissection; however, it was noted that there was an inability to dissect deeper than 2 to 3 mm without very high rates of follicle transection. The design was changed to a blunt punch dissection system based on the technology of the SAFE System for FUE.
In this chapter, we will examine the dissection technique and discuss the system operation (Video 66.1).1
66.2 Hardware Overview
The ARTAS System (AS) is a computer-controlled robotic device that uses a camera system to acquire information about the donor hair details such as hair angles, directions, and follicular unit density. The dissection mechanism utilizes an inner sharp needle and an outer blunt punch that dissects the follicular group from the skin. A skin tension device with fiducial markings stabilizes the skin and defines the active donor area to the system.1
The user interface (UI) with the system talks with a computer console along with a handheld pendant. This interface allows system maintenance functions as well as the ability to adjust default dissection parameters.
66.2.1 Dissection Punches
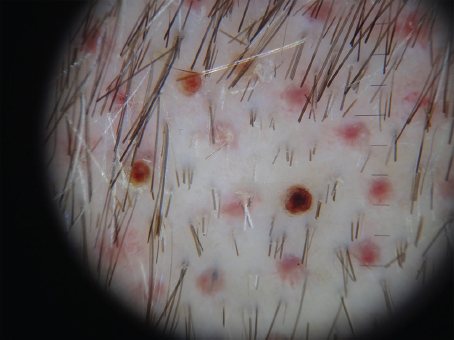
The dual punch dissection system consists of a two- or four-pronged inner needle (IN) used to “score” or incise the skin and an outer blunt “coring” punch (CP) that enters the incision created by the IN, dilates the incision, and dissects the graft. The reason for the dual punch system is related to the need to stabilize the skin with the tension device and how it alters the natural skin interaction with the robotic device’s blunt CP. The IN has two configurations, a two- and a four-prong arrangement (Fig. 66.1), with the four-prong system intended to create a more uniform limited depth incision. There are black bands on the punch that are “seen” by the vision system that allows the system to adjust incisions to the desired depth as determined by the operator. The IN creates a shallow incision, approximately 1.5 to 2 mm deep, which is enough to allow the CP to enter the skin easily. The IN comes in an 18- or 19-gauge configuration that corresponds to a 0.9- or 1-mm-diameter skin incision and these are the actual sizes of the incisions (Fig. 66.2).
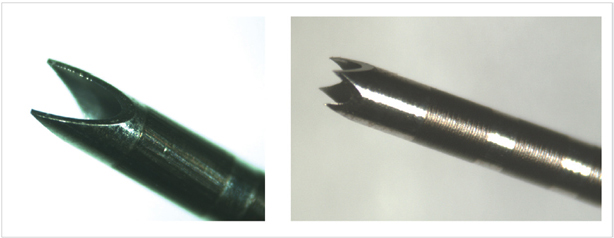
Fig. 66.1 The inner needle system with both the two- and four-prong configurations. The bands on the punch are “seen” by the system to gauge the depth of insertion.
The CP (Fig. 66.3) is a blunt punch that fits into the incision created by the IN and dilates the opening. The outer diameter of the 18-gauge system CP is 1.8 mm and that of the 19-gauge system is 1.6 mm. Using a rotation speed of approximately 800 or 3,000 rotation per minute (RPM), it separates the targeted follicle group from the surrounding skin. As with the IN, the user can use one of two sizes that correspond with the two available sizes of the INs. The length of the CP is either 4 mm or, for longer follicles, 6 mm. The CP has marking bands that the system will use to evaluate the depth of insertion of the CP and make real-time adjustments based on the parameters specified by the operator.
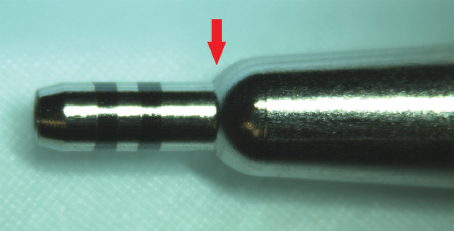
Fig. 66.3 The blunt coring punch with its markings. The red arrow indicates the 4-mm depth limiter.
66.2.2 Skin Tensioner
The skin tensioner (ST) is a device to stabilize the skin for accurate insertion of the IN and CP. The ST (Fig. 66.4a) has small pins on each of four sides that engage the skin when the device is applied to the surface. On the opposite side are its fiducial markings that the system reads with its cameras to gain information (Fig. 66.4b). Just prior to the application of the ST, it is compressed with an application device, then pressed onto the donor area; the pins enter the skin and when the device is released, a stretching force is induced.
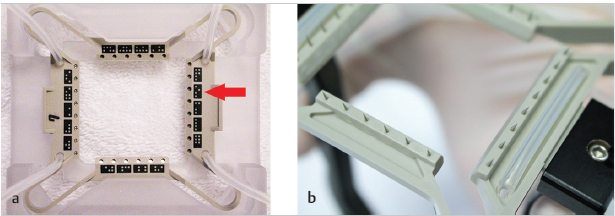
Fig. 66.4 The skin tension device (a) with its fiducial markings in red arrow and tension pins (b).
Related posts:
 Hair Anatomy and Histology for the Hair Transplant Surgeon
Hair Anatomy and Histology for the Hair Transplant Surgeon
 Plugged in: How to Ensure That Your Practice Thrives (and Survives) in Today’s DigitalWorld
Plugged in: How to Ensure That Your Practice Thrives (and Survives) in Today’s DigitalWorld
 Transplanting into Areas of Cicatricial Alopecia
Transplanting into Areas of Cicatricial Alopecia
 Special Considerations for Postoperative Care in Follicular Unit Excision
Special Considerations for Postoperative Care in Follicular Unit Excision
 Hairline and Recipient Area Repair of Poor Previous Transplantation
Hairline and Recipient Area Repair of Poor Previous Transplantation
 Ergonomics in Hair Restoration Surgery: FUE Technique
Ergonomics in Hair Restoration Surgery: FUE Technique
Stay updated, free articles. Join our Telegram channel

Full access? Get Clinical Tree


